Expressing inverse hyperbolic functions as natural logarithms si nh¡1 x= l (+ p 2 1 )¡ 1< cosh¡1 x = ln(x+ p x2 ¡1) (x ¸ 1) tanh¡1 x = 1 2 ln 1+x 1¡x (jxj < 1) sech¡1x = ln ã 1+ p 1¡x2 x! The key is to know the derivatives. We’ll show you how to use the formulas for the integrals involving inverse trigonometric functions using these three functions.
Integrals with inverse trigonometric functions
22 1 sec du u arc c u u a aa ³ why are there only three integrals and not six?
We can apply the same logic to finding the remainder of the general integral formulae for the inverse trig functions.
The functions also called the circular functions comprising trigonometry. The other inverse functions are similarly defined using the corresponding trig functions. From derivatives, you can get these integral forms. In the past, we will have a difficult time integrating these three functions.
∫ d u u u 2 − a 2 = 1 a a r c s e c u a + c.
Watch the following video to see the worked solution to. Integrals producing inverse trigonometric functions. ∫ du a2+u2 = 1 a tan−1 u a +c ∫ d u a 2 + u 2 = 1 a tan − 1 u a + c. ∫ du u√u2−a2 = 1 a sec−1 u a +c ∫ d u u u 2 − a 2 = 1 a sec − 1 u a + c.
(0 < x · 1) cs h¡1 x =ln ã 1 + p 1+x2 j!
∫ d u a 2 + u 2 = 1 a arctan u a + c. 2 12 19 dx ³ x The following integration formulas yield inverse trigonometric functions. 22 arcsin du u c au a ³ 2.
∫ sin−1x dx= xsin−1x+√1−x2+c 1.
∫ du √a2−u2 = sin−1 u a +c ∫ d u a 2 − u 2 = sin − 1 u a + c. X + 1 − x 2 + c. Using our knowledge of the derivatives of inverse trigonometric identities that we learned earlier and by reversing those differentiation processes, we can obtain the following integrals, where `u` is a function of `x`, that is, `u=f(x)`. Find the value of tan(sin−1(1 5).
Examples include techniques such as int.
Assume a > 0 a > 0 : ∫ d u a 2 − u 2 = sin −1 u | a | + c ∫ d u a 2 − u 2 = sin −1 u | a | + c 142 dx x ³ 2. We mentally put the quantity under the radical into the form of the square of the constant minus the square of the variable.
Although there are actually six inverse trig functions, remember that the.
However, only three integration formulas are noted in the rule on integration formulas resulting in inverse trigonometric functions because the remaining three are negative versions of the ones we use. Find the indefinite integral using an inverse trigonometric function and substitution for ∫ dx √9−x2. Sin − 1 ( x 3) + c sin − 1 ( x 3) + c. C is used for the arbitrary constant of integration that can only be determined if something about the value of the integral at some.
Unfortunately, this is not typical.
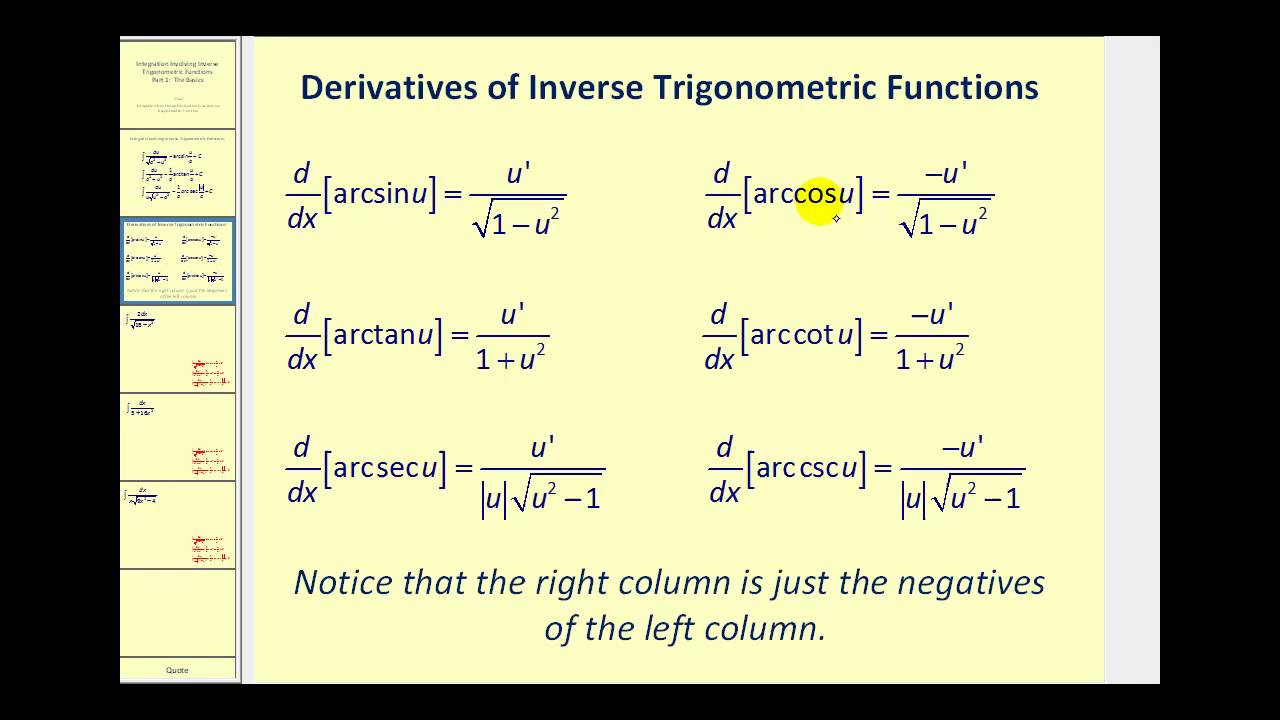
The formula list is given below for reference to solve the problems. 6 derivatives of inverse trig functions the derivatives of the inverse trig functions are shown in the following table. (a) note that the integrand matches the form p1 1 2u The inverse hyperbolic functions sometimes also called the area hyperbolic functions spanier and oldham 1987 p.
∫ d u a 2 − u 2 = arcsin u a + c, a > 0.
D dx arccos x 1 1 x2. Integral formulas inverse trigonometric functions. To solve the different types of inverse trigonometric functions, inverse trigonometry formulas are derived from some basic properties of trigonometry. For antiderivatives involving both exponential and trigonometric.
( 6 0) coth¡1 x = 1 2 ln x+1 x¡1 (jxj > 1) alternate form for integrals involving inverse hyperbolic functions z 1 p u2 §a2 du = ln(u+ p u2 §a2)+c z 1 a2 ¡u2 du = 1
The integration formulas for inverse trigonometric functions can be disguised in many ways. This is a general formula for the integral of sine. There are six inverse trigonometric functions. ∫ d x 9 − x 2.
Trigonometric integrals r sin(x)dx = cos(x)+c r csc(x)dx =ln|csc(x)cot(x)|+c r cos(x)dx =sin(x)+c r sec(x)dx =ln|sec(x)+tan(x)|+c r tan(x)dx =ln|sec(x)|+c r cot(x)dx =ln|sin(x)|+c power reduction formulas inverse trig integrals r sinn(x)=1 n sin n1(x)cos(x)+n 1 n r sinn2(x)dx r sin1(x)dx = xsin1(x)+ p 1x2 +c r cosn(x)=1 n cos n 1(x)sin(x)+n 1 n r cosn.
Integration of inverse trigonometric functions. Cos−1(x)+cos−1(−x) = π sin−1(x)+cos−1(x) = π 2 tan−1(−x) = −tan−1(x) practicing with the inverse functions example 1: Derivatives function derivative sin−1(x) d dx (sin −1x) = √ 1 1−x2, |x| < 1 cos−1(x) d dx (cos −1x) = −√ 1 1−x2, |x| < 1 tan−1(x) d dx (tan −1x) = 1 1+x2 cot−1(x) d dx (cot −1x) = −1 1+x2 sec−1(x) d dx (sec −1x) = 1 |x| √ x2−1 Z 1 p 1 x2 dx= sin 1 x+ c z 1 x2 + 1 dx= tan 1x+ c z 1 x p x2 1 dx= sec x+ c example 3.
Some useful identities here are a few identities that you may find helpful.
22 1 arctan du u c a u a a ³ 3. D dx arcsin x 1 1 x2 theorem 5.17 integrals involving inverse. X d x = x sin − 1. The only difference is whether the integrand is positive or negative.
The following integration formulas yield inverse trigonometric functions:
1 3 arcsec 2x 3 c u 2x, a 3 dx x 4x2 9 2 dx 2x 2x 2 32 1 3 2 arctan 3x 2 c u 3x, a 2 dx 2 9 x2 1 3 3 dx 2 23 dx 4 x2 arcsin x 2 c arcsin x 1 1 x2, arccos x. For a complete list of integral formulas, see lists of integrals. The following is a list of indefinite integrals of expressions involving the inverse trigonometric functions. When you can recognize terms in the integrand that are direct derivatives of inverse trig functions, you can immediately write down the integral.
Use the formula in the rule on integration formulas resulting in inverse trigonometric functions.
This calculus video tutorial focuses on integration of inverse trigonometric functions using formulas and equations. The inverse trigonometric functions are also known as the arc functions.