S = u t + 1 2 a t 2. For every quantity in linear (1d translational) motion, there is corresponding quantity in rotational motion: For a body with uniform mass distribution.
Spice of Lyfe Ap Physics Rotational Motion Formulas
Α = δ ω δ t alpha = dfrac {delta omega} {delta t} α=δtδω.
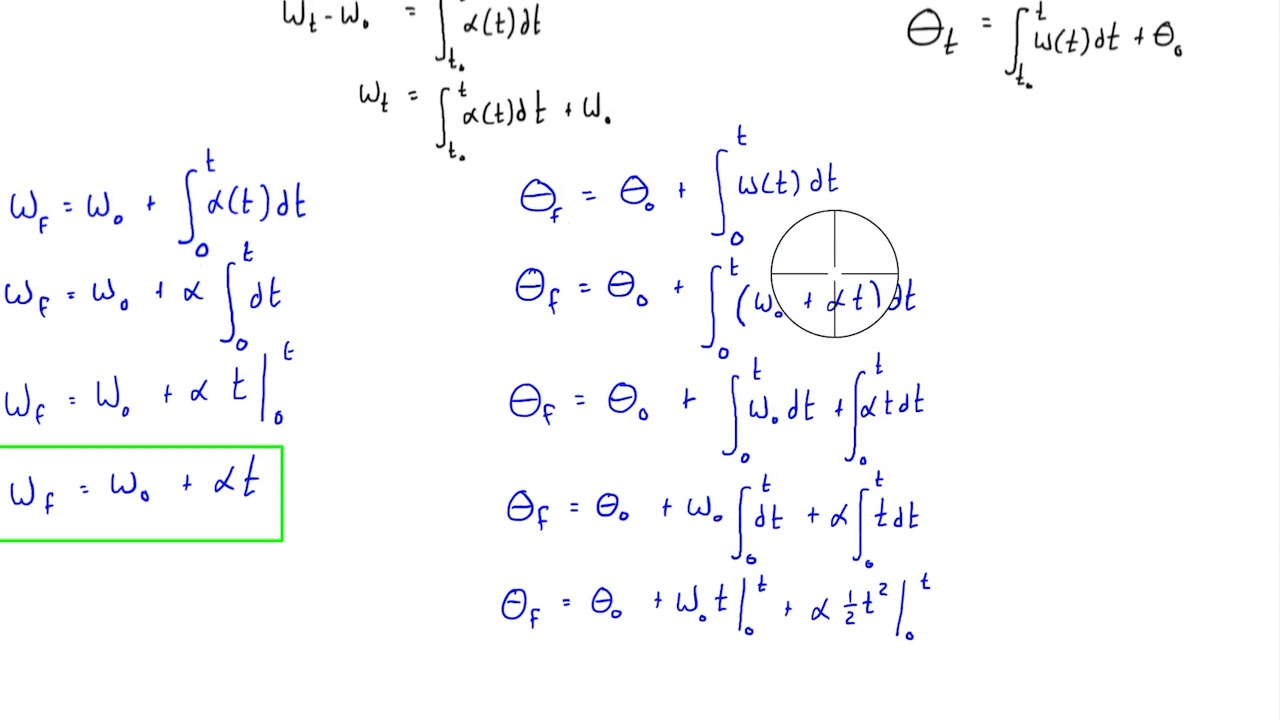
The kinematics of rotational motion describes the relationships between the angle of rotation, angular velocity, angular acceleration, and time.
W = w' + at. In simple words, it shows how the rotating body. I = m 1 r 12 + m 2 r 22 + m 3 r 32 + = ∑ i = 1 n m i r i 2. It explains the relation among the quantities like , and t.
Rotation about a fixed axis.
Θ = (200rev) 2πrad 1 rev =. Rotational inertia is also known as moment of inertia. Ω 2 = ω 1 + αt. Ω=2π/t=2πf where t is the period of the motion and f is the frequency angular acceleration (centripetal acceleration);
It only describes motion—it does not include any forces or masses that may affect rotation (these are part of dynamics).
The first kinematics equation of a rotating body illustrates the correlation between its angular velocity and angular acceleration and time. A drum of mass m is set into motion in two ways: E = w't + (at^2)/2. V = v 0 + a t v = v 0 + a t (constant a).
We discuss how to cleverly select the point about which one computes torques and angular momentum and present examples.
1 v 2 ∂ 2 x ∂ t 2 = ∇ 2 x {\displaystyle {\frac {1} {v^ {2}}} {\frac {\partial ^. Α alpha α is average angular acceleration, δω is change in angular velocity, and δ t delta t δt is change in. The fundamental equation of motion of a rotating body [see equation ( 456 )], (501) is only valid in an inertial frame. The first angular equation of motion is the equation of angular velocity with the function of time.
The rotational equations of motion for body 2 may be written as euler's equations of motion in vector form as.
From classical equations of motion and field equations; Θ = ω 1 t + 1 2 αt 2. Therefore, we can say that the last equation is the rotational analog of f = ma such that torque is analog of force, angular acceleration is analog of acceleration, and rotational inertia that is mr2 is analog of mass. (a) by a constant 40 n force, and, (b) by a block of weight 40 n.
Ω is the final angular velocity, ω0 is the initial angualr velocity, α is the angular acceleration, t is the time, \ [ \theta {\text { }} = {\text { }} {\omega _0}t {\text { }} + \frac {1}.
Where,w = final angular velocity;w' = initial angular velocity;a = angular acceleration;t = time taken;e = angular displacement. Mechanical, gravitational wave, and electromagnetic wave equations can be derived. Yanqing mountain range / asia pacific university subject list. Week 7 emphasizes finding the equations of motion of rotating and translating rigid bodies.
V = u + a t.
Before using this equation, we must convert the number of revolutions into radians, because we are dealing with a relationship between linear and rotational quantities: Represent the angular acceleration of the drum in each case, select the true statement. Ω 22 = ω 12 + 2αθ. What is the equation of rotational motion?
{\displaystyle \mathbf {i} {\dot {\boldsymbol {\omega }}}+{\boldsymbol {\omega.
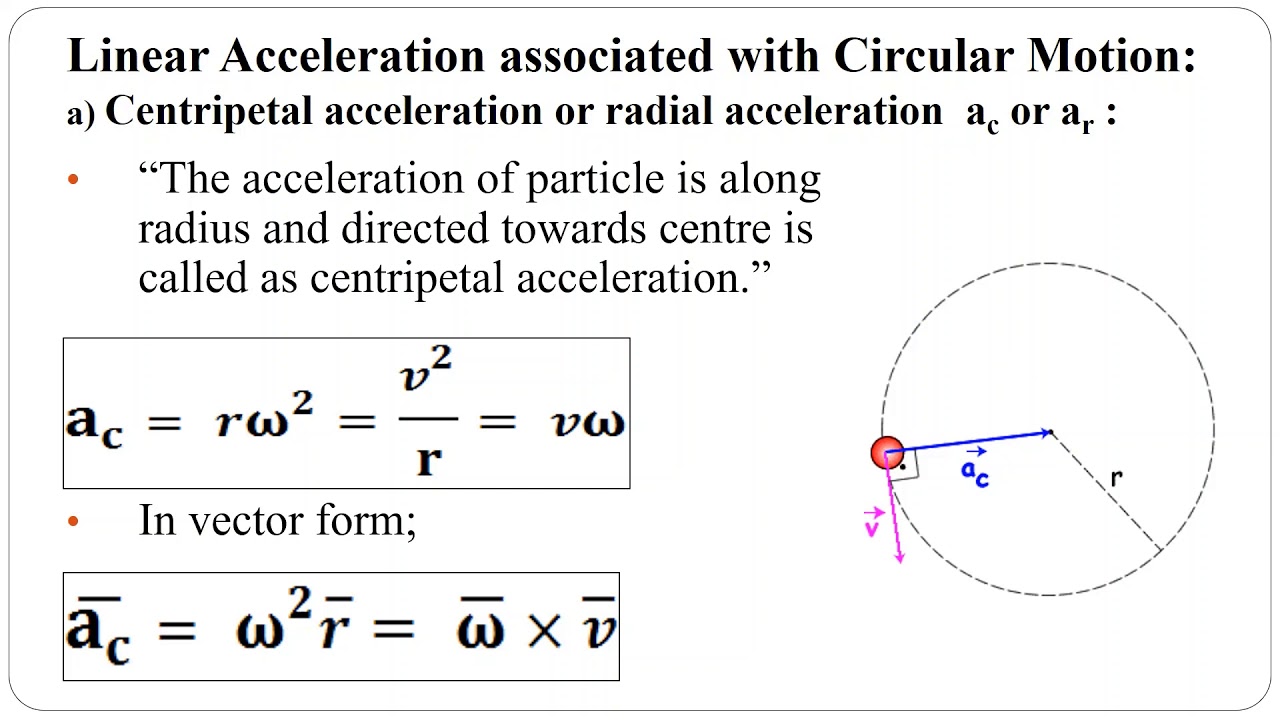
Such a frame of reference rotates with the body, and is. Noting that t/ u˙ =4etjeu˙, we obtain d dt t u˙ =4e tjeu¨ +4e˙tjeu ˙+4e je˙u 6 V=2πr/time where r is the radius of the motion path and t is the period of the motion angularvelocity; Θ= x r θ = x r.
Ω2r, and this has no tangential component at the earth’s surface.
Thus, the scalar equations of motion can be stated as: V v v is linear speed, ω is angular speed, and r is radius. Because the earth has a bulge and is rotating, the effective gravitational force g is the vector sum of the normal gravity to the mass distribution g*, together with a centrifugal force. I ω ˙ + ω × = m.
Translation rotation x dx v dt d = dt dv a dt d = dt f (?) m (?) f = ma (?) = (?) ke = (1/2) m v2 ke = (1/2) (?) 2 the rotational analogue of force is torque.
Equations of motion in a rotating frame consider an orthogonal coordinate system which is rotating about an arbitrary axis with constant angular velocity as seen in figure 3. The general linear wave equation in 3d is: Equations of motion for pure rotation (section 17.4) ∑fn = m (ag)n = m rg ω2 ∑ft = m (ag)t = m rg α ∑mg = ig α since the body experiences an angular acceleration, its inertia creates a moment of magnitude igαequal to the moment of the external forces about point g. Recall the kinematics equation for linear motion:
Thus, lagrange’s equation becomes d dt 14 t u˙ eq.
Just as the terms in translational motion are analogous to the terms in rotational motion, we can write the equations of motion for a particle in rotation. Strained equations of motion are then the equations of rotational motion of the body. Or where ω is the angular velovity, r is the radius and v is the tangential velocity centripetal force; (4.336) before progressing this the angular velocity vector {ω 2 } 1 and angular acceleration vector {α} 1 need to be transformed from reference frame o.
V = ω r v = omega r v=ωr.
However, we have seen that is most simply expressed in a frame of reference whose axes are aligned along the principal axes of rotation of the body. First kinematic equation of angular motion.